معروف است که سیستمهای پیچیده در مقیاس ریز، اجزایشان برهمکنشهای موضعی دارند ولی در مقیاس درشت، رفتارهای «پدیداره» از خود نشان میدهند که شبیه به رفتار اجزا در مقیاس ریز نیستند. اما به راستی این پدیدارگی چیست؟ آیا درک ویژگیها یا رفتارهای پدیداره نیاز به چیزهای دیگری دارد؟ در این سخنرانی که بر اساس مقاله مروری زیر است، به این مسئله میپردازیم.
انگاره پیچیدگی عینک جدیدی برای مطالعه طبیعت به ما میدهد. سیستمهای پیچیده از تعداد زیادی اجزا تشکیل شدهاند و نوعی نظم یا تازگی نسبت به اجزایشان بر آنها حاکم است. این سیستمها در مقیاس ریز، اجزایشان برهمکنشهای موضعی دارند ولی در مقیاس درشت، رفتارهای «پدیداره» از خود نشان میدهند که شبیه به رفتار اجزای آن در مقیاس ریز نیست. پدیدارگی در مورد این جور پدیدههاست.
این ویدیو دعوتی است برای خواندن این مقاله مروری کوتاه:
The term emergence is increasingly used across scientific disciplines to describe phenomena that arise from interactions among a system’s components but cannot be readily inferred by examining those components in isolation. While often invoked to explain higher-level behaviors, such as flocking, synchronization, or collective intelligence, the term is frequently used without precision, sometimes giving rise to ambiguity or even mystique. In this perspective paper, we clarify the scientific meaning of emergence as a measurable, physically grounded phenomenon. Through concrete examples, such as temperature, magnetism, and herd immunity in social networks, we review how collective behavior can arise from local interactions that are constrained by global boundaries. By disentangling emergence from vague overuse, we emphasize its role as a rigorous tool for understanding complex systems. Our goal is to show that emergence, when properly framed, offers not mysticism but insight.
«بارها اندیشیدهام که اگر نویسندهای فرایندی را که یکی از آثارش گامبهگام تا نقطهٔ نهاییِ اتمام پیموده است شرح دهد، چه مقالهٔ خواندنیای برای یک مجله رقم خواهد خورد. نمیدانم چرا تاکنون چنین نوشتهای به جهان عرضه نشده است؛ بیشتر نویسندگان—بهویژه شاعران—مایلاند چنین پنداشته شود که آفریدههایشان محصول نوعی شورِ ظریف یا شهودِ وجدآور است، و حقیقتاً از آن میهراسند که به خوانندگان اجازه دهند پشت صحنه را ببینند؛ چرخها و چرخدندهها، سازوکار جابهجاییِ صحنه، نردبانها و تلههای دیوان، پرهای خروس، رنگ سرخ و وصلههای سیاه که در نود و نه مورد از صد، سازوبرگِ بازیگرِ ادبی را تشکیل میدهند. […] در سراسر شعر کلاغ، حتی یک نقطه را نمیتوان به تصادف یا شهود نسبت داد؛ این اثر گامبهگام، تا رسیدن به کمال، با دقت و ضرورتِ سختگیرانهٔ مسئلهای ریاضی پیش رفته است.»
آنچه خواندید بخشی از مقاله «فلسفه ترکیب» از ادگار آلن پو (۱۸۰۹ بوستون – ۱۸۴۹) بود. او پدر داستانهای گوتیک و جنایی و از پایهگذاران جنبش رمانتیکگرایی در امریکا بود. پو، چهار سال قبل از مرگش، شعر معروف کلاغ (غراب) را منتشر کرد. شعری که نمیدانیم آیا طی چند ساعت یا طی چند سال نوشته شده است. با این وجود، یک سال پس از انتشار کلاغ، پو مقالهای مینویسد به اسم «فلسفه ترکیب» و در آن با جزئیات زیادی روند خلق کلاغ را توضیح میدهد؛ روندی بر اساس قدمهای حساب شده و با دقت و ظرافت برداشته شده. درست جوری که یک معمار با توجهای به طرحی که در سر دارد نقشهای میکشد و بر آجر به آجر بنایش نظارت میکند. در این مقاله پو وانمود میکند که خلق یک داستان یا شعر، محصول یک فرایند مشخص است نه یک الهام یا نبوغ لحظهای.
در ادامه، ترجمه فارسی فلسفه ترکیب آمده. اصل شعر را در اینجا و ترجمه دکتر محمد دهقانی از آن را در انتهای این نوشته میتوانید بخوانید.
شعر کلاغ روایت دانشجوی پریشان حالی است که در یک روز سرد زمستانی، در حالی که در در فراق معشوقهاش «لنور» در حال سوختن است، در خانهاش را میزنند. در را که باز میکند کلاغی وارد اتاقش میشود و رو ی سردیس آتنا مینشید. دانشجو با کلاغ شروع به حرف زدن میکند اما کلاغ در پاسخ به هر پرسش او فقط میگوید «هرگز دگر – Nevermore».
در مقاله فلسفه ترکیب، پو میگوید که سرایش کلاغ، ابتدا برایش یک ایده انتزاعی بوده؛ او میخواسته شعری بسازد در فضایی تیره با لحنی سوگناک و سرشار از مالیخولیا. برای همین ابتدا به ساختارش فکر کرده و تصمیم گرفته که شعری دورانی بنویسد که هر بندش با یک واژهٔ مشخص تمام شود. گامِ نخست برای گزینش واژه، انتخابِ صدا بوده. کدام واکه (vowel) بیش از هر چیز اندوه را در گوشِ شنونده مینشاند؟ واکهٔ کشیدهٔ «ــُــ» (/oː/). سپس دنبال صامتی رفت که در کنار این واکه، هالهای سرد و ماتمزده بسازد؛ «ر» (/r/). ترکیبِ «ـُـ + ر» صدایی است که در واژههای مثل lore، core، door، Lenore…شنیده میشود. پو ادعا میکند در این مرحله، از بین واژهها، بیهیچ جستوجو یا مکثی Nevermore به ذهنش رسیده. سپاس انتهای شعر را در نظر میگیرد. اوج روایت را مینویسند و تصمیم میگیرد هر چیز دیگری که قرار است نوشته شود به اوج داستان لطمهای نزند.
بیشتر آثار پو رازآلود، ترسناک و از همه مهمتر، کوتاه هستند. او معتقد بود پس از شعر منظوم، «داستان کوتاه» بهترین قالب برای نوشتن است چرا که اگر اثری را در یک نشست نشود خواند، وحدت تاثیر«unity of effect» از بین میرود. از طرف دیگر، پو انتظار دارد که شاعر یا نویسنده در فضا و زمان محدودی که دارد چنان زبردستی در انتخاب واژهها و جملات به خرج دهد که از همان ابتدا همه عناصر با چفت و بس محکمی در خدمت ایجاد تاثیر چیده شوند. به همین خاطر برای پو، اندازه و ساختار یک اثر ادبی برایش مثل یک مسئله ریاضی مهم است. او همچنین ابتدا پایان داستانش را میداند و سپس به شروع نگارش و تنظیم کردن همه جزئیاتی میکند که خواننده را به مقصدی که او میخواهد برساند. برای پو، بارها و بارها ویرایش کردن و و دوباره نویسی یک جز تا زمانی که در هماهنگی خوبی با کل قرار بگیرند و پیچیدگی لازم را ایجاد کند امری واجب است.
«اگر از ما میخواستند […] قالبی را برگزینیم که بتواند بیش از هر نوع دیگر نوشتار، نیازهای نبوغ والا را برآورد و میدانِ شایستهای برای نمودِ تواناییهایش فراهم کند، بیدرنگ از «قصۀ منثور» نام میبُردیم. […] همین که خواننده، لحظهای دست از خواندن بکشد، خود به خود برای برهمزدنِ وحدت واقعی اثر کفایت میکند. حال آنکه در داستان کوتاه، نویسنده مجال مییابد مقصود خویش را به تمامی به اجرا برساند. […] اما اگر جملهٔ آغازین او در خدمت آفریدنِ این تأثیر نباشد، نویسنده در همان گام نخست ناکام مانده است.»
در شعر کلاغ، پرسشهای ابتدایی مرد جوان، پرسشهای معمولی هستند و باور مرد این است که کلاغ فقط همین «هرگز دگر» را از صاحب قبلیاش یادگرفته و طوطیوار در واکنش به هر چیزی آن را میگوید. تا اینکه کمکم، مرد عاشق از بیاعتنایی اولیه بیرون آمده و از آن لفظ اندوهبار و تکرارِ پیدرپی آن و با به خاطر آوردن شهرت شوم کلاغ، سوالهای جدیتری میکند. مرد که ابتدا باور داشت که کلاغ جز این چیز دیگری نمیتواند بگوید رفته رفته باور میکند که او از سر خباثت و خصیصهٔ پیشگویانه یا شیطانیاش است که این گونه پاسخ میدهد. او از سر خودآزاری و تا حدی خرافهباوری برانگیخته میشود تا پرسشهایی از پرنده بکند که پاسخ پیشبینیشدهٔ «هرگز دگر» بیشترین لذت اندوه را نصیبش سازد. این به زجر و اندوه مرد جوان دامن میزند و رفته رفته او را به جنون میکشاند. با کشاندنِ این خودآزاری به نهایت، داستان تمام میشود.
Listen to Edgar Allan Poe’s The Raven
در نقد و ثنای پو و فلسفه ترکیب
هر چند که ادعای پو کمی اغراقآمیز به نظر میرسد و ممکن است پس از نوشتن شعر و در اثر فکر کردن زیاد به ساختارش به این جزئیات زیاد رسیده باشد و به گونهای بیشبرازش کرده باشد، با این وجود، مقاله «فلسلفه ترکیب» سرنخهای جالبی در مورد فرایند تولید یک اثر هنری و پشت صحنه یک اثر هنری به ما نشان میدهد. سرنخهایی که برای شاعران بزرگ فرانسوی مانند بودلر، مالارمه و والری فتح بابی برای فکر کردن به یک دستگاه فکریِ منسجم و هدفمند شد.
صد سال پس از مرگ پو،در ۱۹۴۹، تی. اس. الیوتمقالهای نوشت تا اندازهٔ واقعی پو را به مخاطبان نشان دهد—اندازهای که به باور او بسیار کوچکتر از شهرتش است. در این مقاله، الیوت اشاره میکند که پو بیشتر شعبدهبازِ کلمات و آواهاست تا شاعری که واقعاً به معنی واژگان وفادار باشد. از نظر الیوت، کسی که به خوبی با زبان انگلیسی آشنا باشد متوجه میشود که در گزینش واژگان، انتخابهای پو گاهی فقط بهخاطر خوشآهنگی انجام شدهاند و از لحاظ معنا نامناسب هستند. الیوت معتقد بود فلسفه ترکیب پو، نوعی خودفریبی ادبی برای پنهانکردن کاستیهای اوست. الیوت نمیتواند قدرت سحرآمیز ریتمها و آهنگ اشعار پو را انکار کند؛ او حتی تأثیرش بر ژانرهایی مثل داستانهای جنایی و علمی–تخیلی را میپذیرد، اما معتقد است این «جادوی کلام» خیلی زود ته میکشد و چیزی ماندگار بهعنوان شعر ناب باقی نمیگذارد. از نگاه الیوت، پو شاعری «بیریشه» است—نه هویت فرهنگی آمریکایی دارد و نه در سنت ادبی انگلیسی جا میگیرد. پو شاعری است با نبوغی کودکانه که علاقهاش به معماها، پازلها و فضای تاریکِ گوتیک هرگز به اندیشهای بالغ تبدیل نمیشود!
با این وجود، از اواخر دههٔ ۱۹۵۰ به بعد، منتقدانِ بنامی در آمریکا، فرانسه و محافل نظریِ پساساختارگرایی نشان دادند که میتوان از دل همان آثارِ ظاهراً «سطحی» پو، نظامهای زیباییشناختی، اسطورهای و روانکاوانهٔ عمیقی استخراج کرد؛ تلاشهایی که عملاً برداشت تقلیلگرایانهٔ الیوت را کنار زد و جایگاه پو را در ادبیات جدی تثبیت کرد. به طور خاص، هَری لِوین نشان داد که «سیاهی» و سویهٔ اسطورهای آثار پو نه نشانهٔ خامی، بلکه قلبِ تخیل رمانتیک امریکایی است. لِوین عملاً همهٔ اتهامهای الیوت—بیریشگی فرهنگی، سطحیبودن فلسفه و خامدستی زبانی—را وارونه کرد و پو را در مرکز سنت ادبی سدهٔ نوزدهم امریکا نشاند. ریچارد وِلبِر در سخنرانی «خانهٔ پو» (۱۹۵۹) تصویری نمادین و منسجم از دنیای ذهنی پو ساخت و نشان داد که واژگان موسیقایی و حالوهوای «یکدست»ِ پو در خدمت یک کیهاننگاری روانشناختی هوشمندانه است، نه محصول فقر تخیل.
چیزی که برای من، شخصا مهم است، این است که در گذر زمان، پو جایگاهش را در بین مردم حفظ کرده و این سنجه خوبی برای ارزیابی یک اثر هنری میتواند باشد.
اگر $n$ جسم و $n+1$ نخ را بهصورت یک در میان به یکدیگر متصل کنیم و مجموعه را بهطور قائم بیاویزیم، با پایین کشیدن نخ آخر، بسته به اینکه چه شتابی به آن داده باشیم، یکی از نخها پاره میشود. در این مقاله به حل کلی این مسئله که کدام نخ پاره خواهد شد میپردازیم. بخش اول مقاله به فرمولبندی ریاضی مسئله با در نظر گرفتن نخها بهصورت فنرهایی با ثابتهای بهاندازه کافی بزرگ و بخش دوم به بررسی دو حالت خاص $n=1$ و $n=2$ اختصاص مییابد.
نگاره ۱: اجسام آویزان از سقف
فرمولبندی مسئله
$n$ جسم و $n+1$ نخ آنطور که در شکل ۱ نشان داده شده است را در نظر میگیریم. جرم هرکدام از اجسام را برابر $m$ و نخها را بی جرم فرض میکنیم. همانطور که در شکل مشخص است، سیستم در شتاب گرانش $g$ قرار دارد. به نخ پایین نیروی ثابت $F$ را وارد میکنیم بهطوری که شتاب ثابت $a$ را به سمت پایین به انتهای نخ آخر بدهد. برای بهدست آوردن زمان پاره شدن نخها، ابتدا $x_i(t)$ها را که در شکل مشخص شدهاند بهدست میآوریم. بعد از این کار کافی است فرض کنیم که اگر نخها بهاندازه $\Delta l$ کشیده شوند پاره میشوند.
برای بررسی حرکت دستگاه، نخها را بهصورت فنرهایی با طول اولیه $l_0$ و ثابت $k$ در نظر میگیریم. وقتی این مجموعه را بهطور قائم بیاویزیم، طول نخ $p$ام (از بالا) بهاندازه $\Delta l_p = (n-p+1)mg/k$ افزایش مییابد که ناشی از وزن اجسام است. در این حالت با انتخاب نقاط مرجع مناسب میتوانیم تابع انرژی پتانسیل را بهصورت زیر تعریف کنیم.
توجه کنید که $x_p(t)$ از محل تعادل جرم شماره $p$ (از بالا) و $x_0=0$ در نظر گرفته شده. در واقع در این حالت جملات ثابتی نیز باید در انرژی پتانسیل دستگاه در نظر گرفت که به علت عدم تأثیر در معادلات حرکت از نوشتن آنها صرفنظر کردهایم.
با توجه به اینکه $m\ddot{x}_p = -\partial U / \partial x_p$، معادلات حرکت را میتوان چنین نوشت:
همچنین $C_{p1} = (pa/2(n+1))$ و $C_{p2}=0$ است. $C_{p3} = (map/6k(n+1))(p^2-n(n+2)-1)$ و با توجه به شرایط اولیه $x_p(0) = \dot{x}_p(0) = 0$، ضرایب $A_{pj}$ و $B_{pj}$ نیز مشخص میشوند. با مشخص شدن $x_j(t)$ها، میتوانیم معادلات مربوط به پاره شدن نخها را بهدست آوریم. برای این کار کافی است فرض کنیم که وقتی نخها بهطور مشخص $L$ میرسند پاره میشوند. پس زمان پاره شدن نخها را باید از روابط زیر بهدست آوریم:
زمان پاره شدن نخ $p$ام، $t_p$، با قرار دادن $x_{p-1}$ و $x_p$ در معادلهٔ $p$ام (از بالا) دستگاه معادلات (۳) و حل آن بهدست میآید. با مقایسهٔ مقادیر زمانهای لازم برای پاره شدن نخها میتوانیم نخی را که در اثر کشیدن انتهای پایینی مجموعه پاره میشود مشخص کنیم. از آنجا که که بررسی جوابها حتی در حالت $n=1$ به سبب وجود جملات مثلثاتی کار آسانی نیست از روشهای عددی استفاده میکنیم و مسئله را در حالتهای خاص (یک و دو جسم) بررسی میکنیم.
حالت خاص n=1
فرض کنید فقط یک جسم داریم. این مسئله معمولاً در درس مکانیک مقدماتی برای دانشجویان مطرح میشود و بهطور کیفی نیز به آن پاسخ داده میشود. در اینجا به حل کمی این مسئله میپردازیم. در این حالت، معادله حرکت جسم چنین است:
پس معادلات مربوط به زمان پاره شدن نخها چنیناند ($l = mg/k$):
$$\Delta l \mathbin{-} l = \frac{a}{2\omega^2}( \cos(\omega t_1)\mathbin{-} 1) + \frac{a}{4}t^2_1, \quad (۴)$$ $$\Delta l = \frac{-a}{2\omega^2}( \cos(\omega t_2)\mathbin{-} 1) + \frac{a}{4}t^2_2.$$
پارامترهای مؤثر در زمان پاره شدن نخ $k/m$ ، $\Delta l$ و $a$ هستند. ابتدا حالتی خاص را بررسی میکنیم. فرض کنید $k/m$ هزار بر مجذور ثانیه و $\Delta l$ دو میلیمتر باشد. این مقادیر گستره بزرگی از حالتهای معمول و قابل آزمایش در مورد این مسئله را در بر میگیرند. با حل عددی و بهدست آوردن $t_1$ و $t_2$ از معادلات (۴) بهازای این مقادیر $k/m$ و $\Delta l$ و برای چندین شتاب مختلف نمودار شکل ۲ بهدست میآید. این نمودار نشان میدهد که (برای شتابهایی در بازه مشخص شده در شکل) برای شتابهای بهاندازه کافی بزرگ، نخ پایینی و برای شتابهای کم، نخ بالایی پاره میشود این نتیجهگیری با درک شهودی ما از مسئله کاملاً توافق دارد.
اکنون شتاب مربوط به نقطه برخورد در این حالت را پیدا میکنیم. فرض کنید $t=t_1=t_2$. دو طرف معادلات (۴) را با هم جمع میکنیم و $t$ را بهدست میآوریم. اکنون اگر مقدار $a$ در $t=2\sqrt{(2\Delta l \mathbin{-} l)/a}$ را در یکی از معادلهها قرار دهیم و تعریف کنیم $\beta = \sqrt{\left(\frac{\Delta l}{l} \mathbin{-} 1\right)}$ و $\alpha = \sqrt{\frac{a}{4g}}$ نتیجه میشود:
نگاره ۲: نمودار زمان پاره شدن نخها برحسب شتاب در حالت n=1.
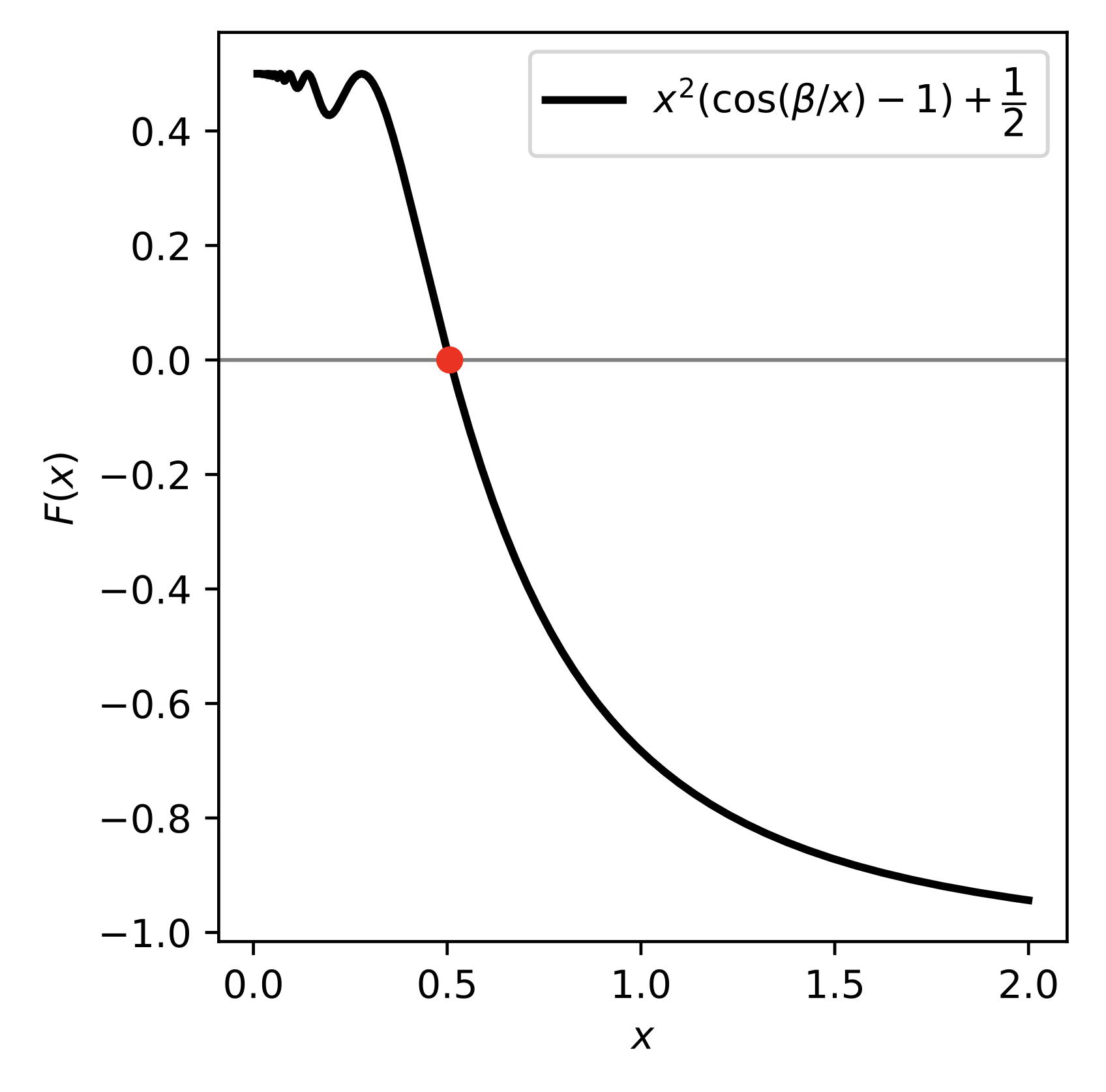
نمودار تابع $F(x) = x^2\big(\cos(\beta/x) \mathbin{-} 1 \big) + \frac{1}{2}$ در شکل ۳ برای حالتی که در آن $\beta = \beta_1 \approx 1.755$ رسم شده است. با حل معادله $F(x) = 0$ (به وسیله کامپیوتر)، ریشه $0.507$ (که در شکل ۳ مشخص شده است) به دست می آید. یعنی شتاب لازم برای پاره شدن همزمان نخها تقریبا ده متر بر مجذور ثانیه است. که با نمودار شکل ۲ توافق دارد.
برای اینکه ثابت کنیم معادله $F(x) = 0$ فقط همین یک ریشه را دارد، کافی است ثابت کنیم که $F'(x)$ به ازای مقادیر $x$ بزرگتر از $\alpha$ نزولی است. این کار را میتوان با محاسبه $F'(x)$ و تقریب زدن $\cos(\beta/x)$ و $\sin(\beta/x)$ با چند جمله از بسط سری آنها به سادگی نشان داد. بنابراین $F(x) = 0$ فقط یک ریشه دارد.
اکنون نشان میدهیم که در همه حالتهای مورد بحث، موضوع به همین شکل است. یعنی همواره یک نقطه برخورد وجود دارد که برای شتابهای کوچکتر از شتاب آن نقطه، نخ بالایی و برای شتابهای بزرگتر از شتاب آن نقطه، نخ پایینی پاره میشود. ابتدا این موضوع را که معادله ۵ یک و فقط یک ریشه دارد، به مقادیر منطقی و مورد بحث در این مقاله تعمیم میدهیم (منظور از مقادیر مورد بحث $\beta$ بعدا مشخص میشود). فرض کنید که بخواهیم معادله (۵) را برای $\beta \approx \beta_2$ بررسی کنیم. اگر $d=\beta_2/\beta_1$ و $\beta_1 = 1.755$ در این صورت با تغییر متغیر $X = x/d$ حل معادله مورد نظر متناظر با یافتن ریشه $H(X)=0$ است که در آن
نمودار تابع $H$ از انتقال تابع $F$ به دست میآید. ولی نمودار $F(x)$ اگر تا جایی به پایین انتقال پیدا کند که قسمت تناوبی آن بالای محور $x$ قرار گیرد، نمودار فقط در یک نقطه با این محور برخورد خواهد کرد. با توجه به شکل ۳ میتوان دریافت که اگر انتقال حدوداً کمتر از $0.4$ واحد باشد یعنی اگر $(1/2) \mathbin{-} (1/2d^2) \leq 0.4$، این برخورد صورت نمیگیرد. این شرط با توجه به اینکه در نمودار شکل ۲ داریم $\Delta l/l \approx 2$ متناظر با این است که $\Delta l/l \leq 8$ باشد.
اما در چه حالتهایی بیش از یک نقطه برخورد وجود دارد؟ $\Delta l/l>8$ نشان میدهد که افزایش طول لازم برای پاره شدن نخ، هشت برابر طولی است که در ابتدا با وصل کردن جسم به آن داده میشود. این موضوع نشان میدهد که مقدار کش آمدن نخ و یا ثابتی که برای آن انتخاب کردهایم در مقابل جسم جرم آنقدر زیاد است که تاثیر جسم در پاره شدن نخ، که به صورت جمله نوسانی و مقدار $l$ در معادلات ظاهر میشود، تقریبا از بین میرود. زیرا اگر $\Delta l$ بسیار بزرگتر از $l$ باشد، از معادلات (۴) نتیجه میشود که تاثیر وجود جسم، که به صورت جمله کسینوس و همچنین کاهش مقدار کششی لازم برای پاره شدن نخ بالایی از $\Delta l$ به $\Delta l \mathbin{-} l$ ظاهر میشود، رفته رفته از بین میرود. بنابراین فقط حالتهایی را بررسی میکنیم که نسبت $\Delta l/l$ در حدی باشد که نقش وجود جسم در پاره شدن نخ کاملاً مشخص باشد. به همین دلیل است که در ابتدا جرمی بین دو نخ در نظر میگیریم و دستگاه را به طور قائم در شتاب گرانش قرار میدهیم.
تا اینجا مشخص شد که به ازای تمامی حالتهایی که جسم — با تقریب ما برای آنها — وجود دارد، یک و فقط یک شتاب $a_0$ موجود است که هر نخ را همزمان پاره میکند. اکنون اگر نشان دهیم که شتابهایی مانند $a_1$ و $a_2$ وجود دارند که به ازای $a_c < a_1$ و $t_1 > t_2$ و به ازای $a_c >a_2$ و $t_1 < t_2$ آنچه میخواهیم به آسانی ثابت میشود. اگر معادلات (۴) را به صورت زیر بنویسیم:
چون جمله کسینوس کراندار است با کم کردن $a$ برای مقادیر ثابت $\omega, l, \Delta l$ تاثیر این جمله کم و بیش از بین میرود، بنابراین همیشه میتوانیم $a <a_0$ را آنقدر کوچک بگیریم که این جمله در معادلات قابل چشم پوشی باشد. در این صورت $t_1 = 2\sqrt{(\Delta l \mathbin{-} l)/a}$ و $t_2 = 2\sqrt{\Delta l/a}$. پس همواره از$a <a_0$ نتیجه میشود $t_1 <t_2$.
حالا فرض کنید که $t_1$ و $t_2$ در معادله (۴) بسیار کوچک باشند، به طوری که بتوانیم بسط سری کسینوس را به صورت زیر بنویسم:
$$\Delta l \mathbin{-} l \approx (1 \mathbin{-} \frac{\omega^2 t_1^2}{2} + \frac{\omega^4 t_1^4}{4}\mathbin{-}1) \frac{a}{2\omega^2} + \frac{1}{4}at_1^2, \quad (۶)$$ $$\Delta l \approx \frac{\omega^2 t_2^2}{2} \frac{a}{2\omega^2}+ \frac{1}{4}at_2^2$$
در این صورت، این جوابها بهدست میآیند: $t_{1} = \sqrt[4]{\frac{48\,(\Delta l \mathbin{-} l)}{a\,\omega^2}}$ و $t_{2} = \sqrt{\frac{2\,\Delta l}{a}}$.
با توجه به فرض بسیار کوچک بودن $t_{1}$ و $t_{2}$ و اینکه $a$ برای جواب هر دو زمان در مخرج ظاهر شده است، نتیجه میگیریم که برای مقادیر بسیار بزرگ $a$، جوابهای (۴) با تقریب خوبی به شکل (۶) هستند. با توجه به جواب $t_{1}$ و $t_{2}$ اگر $a<a_c$ آنگاه $t_2<t_1$ به طوری که $a_c = \frac{\Delta l^2 \omega^2}{2(\Delta l \mathbin{-} l)}$. پس برای شتابهای بزرگ و زمانهای کوچک میشود دید که $t_2<t_1$.
بنا بر آنچه گفته شد، با فرض اینکه نمودار جوابهای (۴) در محدودهٔ مورد بررسی ناپیوستگیهای قابل ملاحظهای نداشته باشد (که فرض معقولی است) میتوانیم این نتیجهگیری کلی را بکنیم که برای شتابهای به اندازهٔ کافی بزرگ نخ پایین و برای شتابهای کوچک، نخ بالایی پاره میشود. این مطابق با جوابی است که به صورت شهودی به این مسئله داده میشود.
حالت خاص n=2
برای دو جسم، معادلات زیر را در مورد زمان پاره شدن نخها بهدست آوریم:
$$\Delta l \mathbin{-} l_1= \frac{a}{2\omega_1^2} \cos(\omega_1 t_1)\mathbin{-}\frac{a}{6\omega_2^2} \cos(\omega_2 t_1)+\frac{1}{6}at_1^2 \mathbin{-} \frac{4a}{9\omega_1}),$$ $$\Delta l \mathbin{-}l_2 = \frac{a}{3\omega_2} \cos(\omega_2 t_2) +\frac{1}{6}at_2^2\mathbin{-}\frac{a}{9\omega_1^2},$$ $$\Delta l = \frac{1}{6}at_1^2 \mathbin{-} \frac{a}{2\omega_1^2}\cos(\omega_1t_3)\mathbin{-} \frac{a}{6\omega_2^2}\cos(\omega_2t_3) + \frac{5}{9\omega_1^2}a. \quad (۷)$$
که در این معادلات $\omega_1^2 = \frac{k}{m}, \omega_2^2 = \frac{3k}{m}, l_1 = \frac{2mg}{k}, l_2 = \frac{mg}{k}$.
مشخص است که معادلات (۷) نسبت به حالت $n=1$ بسیار پیچیدهترند و بحث در مورد آنها بسیار دشوارتر از حالت قبل است. در این حالت، به بررسی جوابها فقط در یک مورد خاص بسنده میکنیم.
دوباره مقادیر قبلی را برای $\Delta l$ و $k/m$ در نظر بگیرید. اگر جوابهای (۷) را برای شتابهای مختلف با کمک کامپیوتر بهدست بیاوریم، به نمودار شکل ۴ میرسیم. در این نمودار رفتار شتاب تا $50 \text{ms}^{-2}$ بررسی شده است. این نمودار نشان میدهد که در شتابهای معمولی نخ وسطی پاره نمیشود. حل عددی به ما نشان میدهد که شتاب لازم برای کوچکتر شدن $t_2$ از $t_3$ در حدود ۲۵۰ متر بر مجذور ثانیه است و برای اینکه $t_2$ از $t_1$ کوچکتر شود شتاب بسیار بیشتر که منطقی نیست لازم است. بنابراین آنچه که ما در شتابهای معمولی میبینیم این است که مانند حالت $n=1$ برای شتابهای بهاندازه کافی کوچک، نخ بالایی و برای شتابهای بزرگ نخ پایینی پاره میشود.
نگاره ۴: زمان پاره شدن هر یک از نخها
نتیجهگیری
نتایجی که در پایان حالتهای خاص گرفته شد، یعنی پاره شدن نخ بالایی برای شتابهای کم و نخ پایینی برای شتابهای زیاد، با درک فیزیکی ما از مسئله کاملاً سازگار است. جوابهایی که در کلاسهای درس مکانیک به حالت $n=1$ داده میشود بیشتر جنبه کیفی دارد ولی آنچه ما در اینجا نشان دادیم، بیانگر این موضوع است که این جوابهای کیفی با حل کمی نیز تأیید میشوند. در طول حل مسئله مواردی پیش آمد که به منظور جلوگیری از پراکنده شدن مطلب اصلی، اقدام به بیان دقیق و بررسی جزئیات و انجام اعمال ریاضی نکردیم؛ دقیقتر کردن این موارد با کسی حوصلهمند امکانپذیر است (نویسنده این کار را انجام داده است). در هر صورت با وجود ایرادهایی که به فرضهای اولیه ما وارد است، مثلاً اینکه طبیعت نخها مخصوصاً در آستانه پاره شدن به صورت یک فنر ایدهآل که ما فرض کردیم رفتار نمیکنند و یا فرضیههایی مانند برابر بودن جرم اجسام و یا ثابت بودن شتاب پایین کشیدن نخها که از کلیت مسئله میکاهد، موضوع جالب توجه اینجاست که جواب بهدست آمده با تقریب در نظر گرفتن نخها بهصورت فنر در محدوده مورد بررسی، کاملاً با تجربه سازگار است و شهود کیفی ما را از مسئله تأیید میکند.
سپاسگزاری
در اینجا لازم است از آقای دکتر محمود بهمنآبادی که برای حل این مسئله از راهنماییهای ارزنده ایشان استفاده کردهام تشکر کنم.
شرلوک هولمز در کتاب نشانهٔ چهار روشی را برای کشف حقیقت بهکار میبرد که میتوان اسمش را گذاشت روش حذف ناممکنها: وقتی همهٔ حالتهای ناممکن را کنار گذاشته باشی، آنچه باقی میماند، هرچهقدر هم نامحتمل، باید حقیقت باشد.
این روش، مثل بسیاری از روشهای دیگری که هولمز به کار میگیرد، جذاب و هیجانانگیز است ولی آیا در عمل و در شرایط واقعی هم میتوان چنین روشهایی را بههمان سادگی بهکار برد؟ واقعیت این است که در عمل ممکن است موانع فراوانی کاربردپذیری این روش را به چالش بکشد. در این یادداشت به دو مورد از این موانع نگاه دقیقتری میاندازیم. نخست این که تشخیص ناممکن بودن بعضی حالتها که در ابتدا محتمل بودهاند با چه دقتی انجام میشود؟ آیا ممکن نیست خطایی در این تشخیص وجود داشته باشد؟ مثلاً در همین مکالمه که از کتاب نشانهٔ چهار نقل شد هولمز به واتسن میگوید: «میدانیم که او از در یا از پنجره یا دودکش وارد نشده» این «میدانیم» چهقدر دقیق است؟ آیا ممکن است خطایی در مشاهده یا جمعآوری شواهد وجود داشته باشد که این نتیجهگیری را نادقیق کند؟ دوم این که آیا همهٔ حالتهای ممکن از ابتدا در نظر گرفته شدهاند؟ مثلاً آیا ممکن است که بهجز در، پنجره، دودکش و سوراخ سقف راه دیگری هم برای ورود به اتاق بوده باشد که از نظر کارآگاه دور مانده باشد؟ چنین اتفاقاتی تا چه اندازه میتواند اعتبار نتیجهگیری نهایی را به خطر بیندازد؟
هولمز در حالی که سرش را تکان میداد گفت: تو به توصیهٔ من عمل نمیکنی. چند بار به تو گفتهام که وقتی ناممکن را حذف کرده باشی، آنچه باقی میماند، هر قدر هم بعید، باید حقیقت باشد؟ میدانیم که او از در یا از پنجره یا دودکش وارد نشده. این را هم میدانیم که نمیتوانسته در اتاق پنهان شده باشد، چون مخفیگاهی وجود ندارد. پس از کجا آمده؟
– من فریاد زدم از سوراخ سقف آمده؟ – معلوم است که از آنجا آمده.
برای بررسی خطای آزمونهایی که حالتهای ناممکن را مشخص میکنند مثال سادهای در نظر میگیرم. فرض کنید $n+1$ جعبه داریم که در یکی از آنها یک توپ وجود دارد. جعبهها را با $1,2,\cdots, n , z$ برچسب میزنیم. هیچ اطلاعات اضافهٔ دیگری که بتواند راهنمایی برای تشخیص جعبهٔ محتوی توپ باشد نداریم، بنابراین فرض میکنیم که توپ میتواند با احتمال یکسان در هر یک از این $n+1$ جعبه باشد. (میتوان مسئله را به شکل عامتری هم طرح کرد، مثلاً میتوان فرض کرد که احتمال این که توپ در جعبهٔ شمارهٔ $i$ باشد $p_i$ است و $\sum_{i=1}^n p_i+p_z=1$.)
فرض کنید $A_i$ پیشامد قرار داشتن توپ در جعبهٔ شمارهٔ $i$ باشد. همچنین فرض کنید برای تشخیص این که یک جعبه توپی در درونش ندارد از آزمایشی مانند تکان دادن جعبه یا اسکن کردن آن با پرتو ایکس استفاده کنیم. پیشامدی را که در آن نتیجهٔ آزمایش روی جعبهٔ شمارهٔ $i$ خالی بودن آن را نشان میدهد $E_i$ مینامیم. این آزمایش ممکن است خطا داشته باشد، بهاین معنی که ممکن است توپ در جعبهٔ شمارهٔ $i$ باشد ولی نتیجهٔ آزمایش خلاف این را گزارش کند. احتمال چنین خطایی را با $r$ نشان میدهیم. به بیان ریاضی $P(E_i|A_i)=r$.
جعبههای شمارهٔ $1$ تا $n$ را آزمایش میکنیم و نتیجهٔ آزمایش این است که توپ در هیچ یک از این جعبهها نیست. طبق روش هولمز میتوانیم بگوییم که توپ قطعاً در جعبهٔ $z$ است. اما احتمال خطا در آزمایشهای ما وجود دارد و بنابراین ممکن است توپ در یکی از جعبههایی باشد که آزمایش خالی بودن آن را نشان داده. در چنین شرایطی نمیتوان گفت که توپ قطعاً در جعبهٔ $z$ است. سؤال درست این است که احتمال قرار داشتن توپ در جعبهٔ $z$ چهقدر است. چنین احتمالی با عبارت ریاضی زیر بیان میشود $$P(A_z|\bigcap_{i=1}^{n} E_i) = P(A_z|E_1\cap E_2\cap \cdots \cap E_n) = P(A_z \mid \mathcal{E}).$$ در اینجا $\mathcal{E} := \bigcap_{i=1}^{n} E_i$ اشتراک بین همه پیشامدهاست. با به کارگیری قاعدهٔ بیز: $$\begin{aligned} P(A_z \mid \mathcal{E}) = \frac{P(A_z \cap \mathcal{E})}{P(\mathcal{E})} \end{aligned}$$ و در نتیجه $$P(A_z \mid \mathcal{E})= \frac{P(\mathcal{E} \mid A_z)\, P(A_z)}{P(\mathcal{E} \mid A_z)\, P(A_z) + \sum_{i=1}^{n} P(\mathcal{E} \mid A_i)\, P(A_i)}$$
فرض میکنیم آزمایشهای جعبههای مختلف مستقل باشند یعنی آزمایش یک جعبه روی نتیجهٔ آزمایش یک جعبهٔ دیگر اثری نداشته باشد. در اینصورت خواهیم داشت $$P(\mathcal{E}|A_z)=(1-r)^n$$ زیرا اگر توپ در جعبهٔ شمارهٔ $z$ باشد یعنی همهٔ آزمایشها نتیجهٔ درست دادهاند و احتمال درست بودن نتیجهٔ هر آزمایش $1-r$ است. بههمین ترتیب بهسادگی میتوان دید که $$P(\mathcal{E}|A_i)=r(1-r)^{n-1}\,, i=1,2,\cdots , n$$ و بنابراین \begin{eqnarray} P & = & \frac{(1-r)P(A_z)}{r\left(1-P(A_z)\right)+(1-r)P(A_z)}\nonumber\ & = & \frac{1-r}{nr+1-r}\nonumber \end{eqnarray} که در آن از $P(A_z)=\frac{1}{n+1}$ استفاده کردهایم.
بیایید نگاهی به نتیجهٔ این رابطه برای یک حالت مشخص بیندازیم. فرض کنید ده جعبه داریم (یعنی $n=9 $) و آزمایش ما برای تشخیص خالی بودن جعبهها ده درصد خطا دارد (به این معنی که به طور میانگین از هر ده آزمایش یکی نتیجهٔ نادرست میدهد). در این صورت رابطهٔ بالا میگوید که $P=0.5$. یعنی احتمال این که توپ در جعبهٔ آخر (جعبهای که آزمایش نشده) باشد پنجاه درصد است. بهطور کلی اگر احتمال خطا در آزمایش تشخیص حالتهای ناممکن برابر با احتمال همان حالتی باشد که در آخر و پس از حذف ناممکنها قرار است بهعنوان «حقیقت» معرفی شود، خطای تشخیص حقیقت پنجاه درصد خواهد بود!
خطا در تعیین همهٔ حالتهای ممکن
ایراد دیگری که میتواند کارایی این روش را به چالش بکشد این است که از ابتدا همهٔ حالتهای ممکن را تشخیص نداده باشیم و بعضی از آنها از چشم ما دور مانده باشند. اگر به مثال بخش قبل برگردیم میتوانیم فرض کنیم که مثلاً یک جعبهٔ دیگر (جعبهٔ شمارهٔ $m$ وجود دارد) که در میان $n+1$ جعبهٔ موجود نیست و مثلاً پشت یک پرده مخفی شده است ولی توپ میتواند درون آن جعبه هم باشد. احتمال وجود توپ در آن جعبه را با $P(A_m)$ نشان میدهیم. بهعبارت دیگر اگرچه ما تصور میکنیم که حاصلجمع احتمالهای وجود توپ در $n+1$ جعبهٔ موجود برابر با یک است ولی درواقع این احتمال کوچکتر از یک است: $$\sum_{i=1}^n P(A_i)+P(A_z)=1-P(A_m)$$. بنابراین حتی اگر آزمایشهای ما بیخطا باشند و بگویند که توپ در جعبههای شمارهٔ $1$ تا $n$ نیست باز هم ممکن است جعبهٔ شمارهٔ $z$ را باز کنیم و ببینیم که خالی است. احتمال چنین نتیجهٔ ناگواری $P(A_m)$ است. برای اجتناب از مواجه شدن با چنین وضعیتی باید حداکثر تلاش را برای تشخیص و بهحسابآوردن همهٔ حالتهای ممکن به خرج داد.
بهعنوان آخرین مثال حالتی را در نظر میگیریم که هم آزمایشها احیاناً خطا داشته باشند و هم از ابتدا همهٔ حالتهای ممکن تعیین نشده باشند و مثلاً جعبهٔ شمارهٔ $m$ از قلم افتاده باشد. در این صورت بهسادگی میتوان دید که وقتی آزمایشها نشان میدهند که توپ در هیچ یک از جعبههای $1$ تا $n$ نیست، احتمال پیدا کردن توپ در جعبهٔ $z$ برابر است با $$P=\frac{(1-r)P(A_z)}{r(1-P(A_z)-P(A_m))+(1-r)(P(A_z)+P(A_m))}$$ و باز اگر همهٔ جعبهها را هماحتمال بگیریم، یعنی $$P(A_z)=P(A_m)=P(A_i)=\frac{1}{n+2}$$ خواهیم داشت $$P=\frac{1-r}{nr+2(1-r)}.$$ برای مقایسهٔ این نتیجه با نتیجهٔ بخش قبل فرض میکنیم تعداد همهٔ جعبههای در اختیار ما ده تاست (یعنی $n=9$) ولی تعداد کل جعبهها درواقع یازده تاست و احتمال وجود توپ در این یازده جعبه یکسان است ($\frac{1}{11}$). احتمال خطای آزمایش را هم مانند قبل ۰/۱ میگیریم. در اینصورت احتمال یافتن توپ در جعبهٔ $z$ برابر خواهد بود با $P=\frac{1}{3}$. بهعبارت دیگر آن حالتی را که با روش حذف ناممکنها حقیقت محض میدانیم فقط کمی بیش از سی درصد احتمال دارد که حقیقت باشد!
سخن پایانی
دنیای واقعی بر خلاف دنیای قصهها پر از عدم قطعیت، خطا و بیدقتی است. در چنین دنیایی دست یافتن به حقیقت به سادگی قصهها نیست. بنابراین برای پرهیز از نتیجهگیری نادرست یا پیشبینی نادرست بهتر است تا حد امکان نگاه همهجانبه به پدیدهها داشته باشیم و امکان بروز خطا در مشاهدهها و آزمایشها را نیز نادیده نگیریم.
پارادوکس «گربه و نان کرهای»—این پرسش طنزآمیز که اگر به پشت یک گربه تکهای نان تُست کرهمالشده ببندیم، چه خواهد شد؟ نان تُست همیشه از سمتِ کرهایاش روی زمین میافتد و گربهها هم همیشه روی پاهایشان فرود میآیند؛ اما این تضادِ بامزه، درواقع تنها یک شوخی ذهنی است. با این حال، تواناییِ واقعیِ گربهها در اینکه هنگام سقوط، بدنشان را بچرخانند و روی پا فرود آیند، شوخی نیست. این مسئله سالها ذهن دانشمندان را به خود مشغول کرده بود، چرا که به نظر میرسید با یکی از اصول مهم فیزیک، یعنی «پایستگی تکانه زاویهای»، ناسازگار باشد. اگر گربه را به شکل استوانهای صُلب تصور کنیم، چنین جسمی هنگام سقوط نمیتواند ناگهان تکانه زاویهای تولید کند؛ ولی گربهها این کار را به سادگی انجام میدهند.
در سال ۱۹۷۵، جک هدرینگتون، مقالهای نوشت و در سراسر آن از ضمیر «ما» استفاده کرد. وقتی سردبیر ژورنال اعلام کرد که باید نویسندهٔ دوم نیز وجود داشته باشد، هدرینگتون برای آنکه مجبور به تایپ دوبارهٔ مقاله نشود، اسم گربهاش «چستر» را بهعنوان همکار نویسنده درج کرد. اکنون این گربه یک پروفایل رسمی با اسم اِف. دی. سی. ویلارد در گوگل اسکالر دارد که نشان میدهد مقالاتش تا امروز ۱۱۳ بار مورد استناد پژوهشگران دیگر قرار گرفته است!
گربهها موجودات عجیبی هستند. از هر جایی و هر طوری که رهایشان کنی، دست آخر روی پنجه فرود میآیند. بدن گربه نه یک استوانهٔ صُلب، بلکه مجموعهای انعطافپذیر از دو بخشِ جداگانه است که میتواند در جهات مخالف یکدیگر خم شود و بچرخد. چگونگی انجام این کار، اولین بار در سال ۱۹۶۹ توسط یک مدل ریاضی توضیح داده شد. انعاطفپذیری زیاد گربهها و اینکه در هر ظرفی جا میشوند و شکل آن را به خود میگیرند هم سبب شده تا مردم به شوخی بگویند گربه مایع است. ارک-آنتوان فاردین، در مقالهای با عنوانِ «گربههای مایع»، از آنها برای توضیح چند مفهوم پایهای در رئولوژی (مطالعه جریان و تغییر شکل مواد) استفاده کند. این پژوهش شوخطبعانه باعث شد فاردین در سال ۲۰۱۷ جایزهٔ ایگ نوبل فیزیک را دریافت کند.
اما در دنیای فیزیک، مشهورترین گربه، «گربهٔ شرودینگر» است. این آزمایش فکری را اروین شرودینگر، ابتدا برای انتقاد از «تفسیر کپنهاگی مکانیک کوانتومی» مطرح کرد. هدف او تأکید بر تناقضی بود که در قلب نظریهٔ کوانتوم وجود داشت: گربهای که همزمان هم زنده و هم مرده است. شرودینگر شاید صرفاً به دنبال تأکید بر یک نکتهٔ عجیب و غیرمعمول بود؛ اما برهمنهیِ کوانتومی که گربهٔ فرضیاش توصیف میکند کاملاً واقعی است.
در فیزیکِ نور میتوان دو حالت نوری را که فازهای متفاوت و متضادی دارند با هم ترکیب کرد و وضعیتی به نام «حالت گربهای» ساخت. اگر شدت نور در چنین حالتی اندک باشد، به آن «حالت بچهگربهای» میگویند. این «حالتهای گربهای» صرفاً کنجکاوی نظری نیستند؛ آنها کاربردهایی جدی در حوزهٔ اطلاعات کوانتومی دارند. برای نمونه، «کدهای گربهای» یکی از روشهای معروف برای تصحیح خطا در رایانش کوانتومی هستند.
در داستان آلیس در سرزمین عجایب، «گربهٔ چشایر» میتواند بهتدریج ناپدید شود و تنها لبخندش را در هوا باقی بگذارد. اخیراً دانشمندان حالتی کوانتومی به نام «گربهٔ چشایرِ کوانتومی» را شناسایی کردهاند که در آن ویژگیهای یک ذره (مانند تکانهٔ مغناطیسی) میتواند از خودِ ذره جدا شده و در مسیر متفاوتی حرکت کند. این گربههای عجیب حتی میتوانند ویژگیهایشان (مانند همان لبخند معروف) را با هم مبادله کنند!
The physics of cats. Nat Rev Phys7, 165 (2025) https://doi.org/10.1038/s42254-025-00824-6